
Autonomous Ground Control Station for Aerial Surveillance
MAVLink Signal Packet Rate
MAVLink Payload length
INTRODUCTION
Autonomous flight has been widely sought after for its capability to reduce human involvement in redundant, repetitive tasks such as surveillance, monitoring and periodic surveys, inspection and remediation, among many other activities. Manually flying an aircraft over designated area requires a designated pilot that conducts these regular flights, which would incur overheads, further adding to the operational costs involved. And since manual flight lacks any standardised or fixed flight path, which further prevents data analysts to bring in any automation into such periodic activities. Invariably, controlling drones from a remote location proves to be a viable alternative with lower operational costs and minimal errors, leading to the development of Ground Control Stations (GCS) that guides autonomous vehicles across a fixed flight path.
Industry
drone and aerospace
Time Frame
Services we offered
Ground Control Station Setup, Web Portal Development
Codemonk’s Approach to Establishing a GSC
The engineering team at Codemonk learnt about the Startup’s two newly developed drones, which had to be controlled via the ground control station. These two configurations were designed for equally specific payloads and use cases, with the primary intent of aerial surveillance and gradually moving towards varied flight missions. The proposed GCS had to be compatible with the hardware components and the firmware deployed by the Startup, including scope for preliminary flight calibration, mission planning, execution, and reporting functions.
Codemonk developed a web hosted solution that could read information transmitted from flight controller of both different types of drones, and then perform calibrations required for flight. Signals from the flight controller allows users to control the thrust generated by each motor, modulating each would change the trajectory of the drone (aircraft). This allowed Codemonk to develop protocols to remotely control drones using the motors through the flight controller. Next, the geographical coordinates of the drone transmitted at any time during the flight can be coupled with radio transmission commands to control the trajectory of the drone.
Messages Relayed to GCS
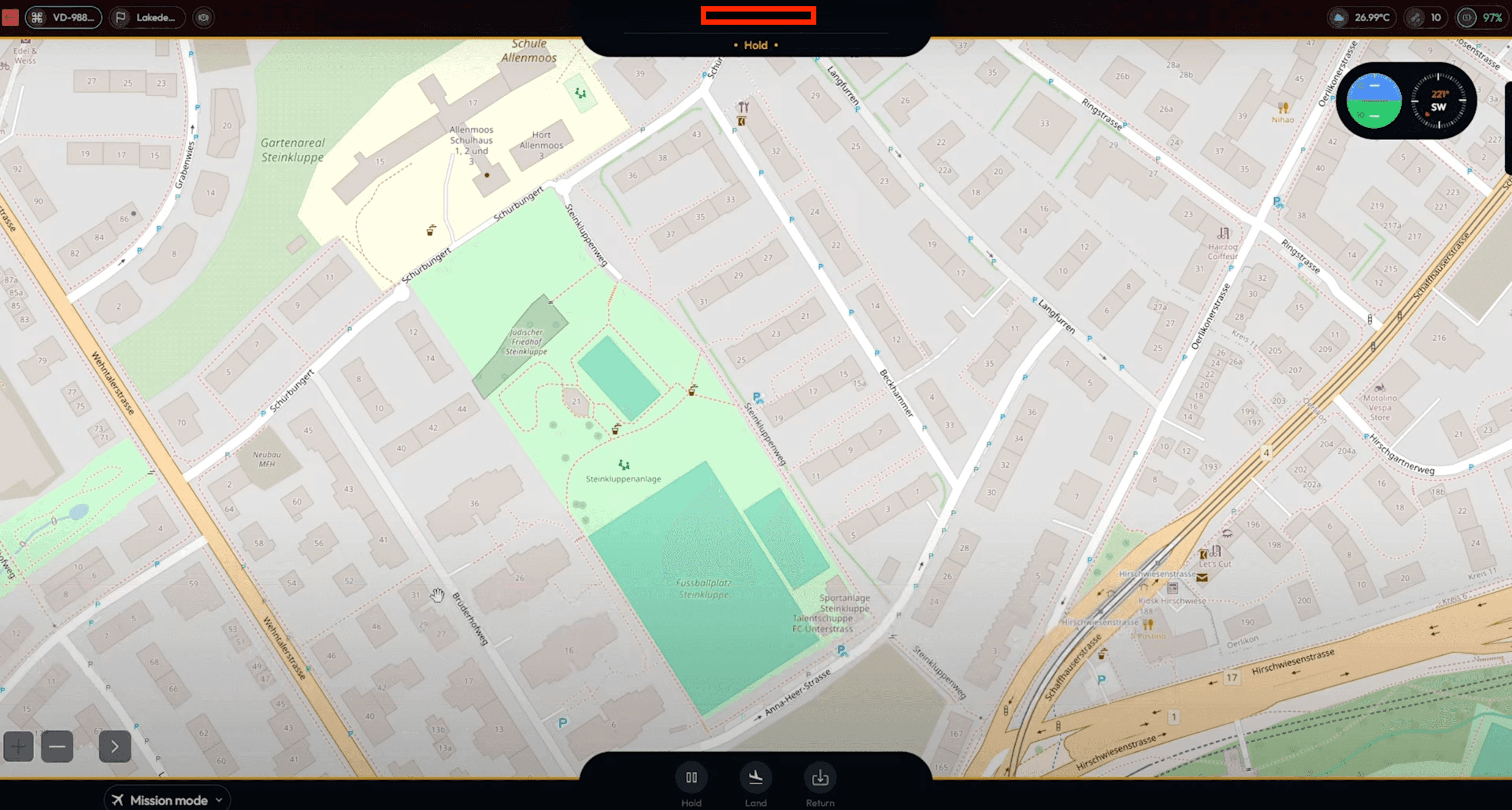
Mission Planning and Ground Control
Codemonk broke down the barebones architecture of the drone being used, along with the telemetry system used, flight controller configuration, ground station setup (for autonomous flight), and finally, and image processing capability (when a payload is attached) that can be implemented with open source libraries.
Engineers then set up the autonomous flight parameters using ArduPilot firmware, coupling it with MAVLink communication protocol to relay information back and forth from the Drone in Surveillance. Synchronising the drone (i.e, flight controller stack and telemetry system) with the GCS, Codemonk developed preliminary flight calibration protocols prior to mission execution, mission script design, fail safe configurations, return to launch protocols, and real-time messaging relay with GCS.

Applications and Autonomous Flight Missions
With the above protocols in place, the Startup could calibrate their fleet of drones using Codemonk's GCS, plan and execute mission scripts, carry payloads specific to the mission plan, telecommunicate essential data during flight and also change or make amendments to scheduled or on-going missions. The drone could not only traverse a charted trajectory, but also change course mid-flight, providing the GCS full control over the operation.
In the next phase of the project, Codemonk plans to develop payload specific mission protocols to support autonomous flights across industry specific use cases, thereby infusing autonomy into otherwise redundant, time+labour consuming activities.
MAVLink Signal Packet Rate
MAVLink Payload length